ISS
Intelligent Self-driving System (ISS) is a modular framework written in Python and C++ with the aim to build an extensible workspace tailored to research. This framework provides both traditional and deep learning algorithms for self-driving related tasks such as perception, localization, mapping, prediction, planning, and control. The modular design with minimal dependency on external libraries can provide a transparent and clean workspace for researchers to evaluate algorithms for autonomous driving systems.
ISS Architecture
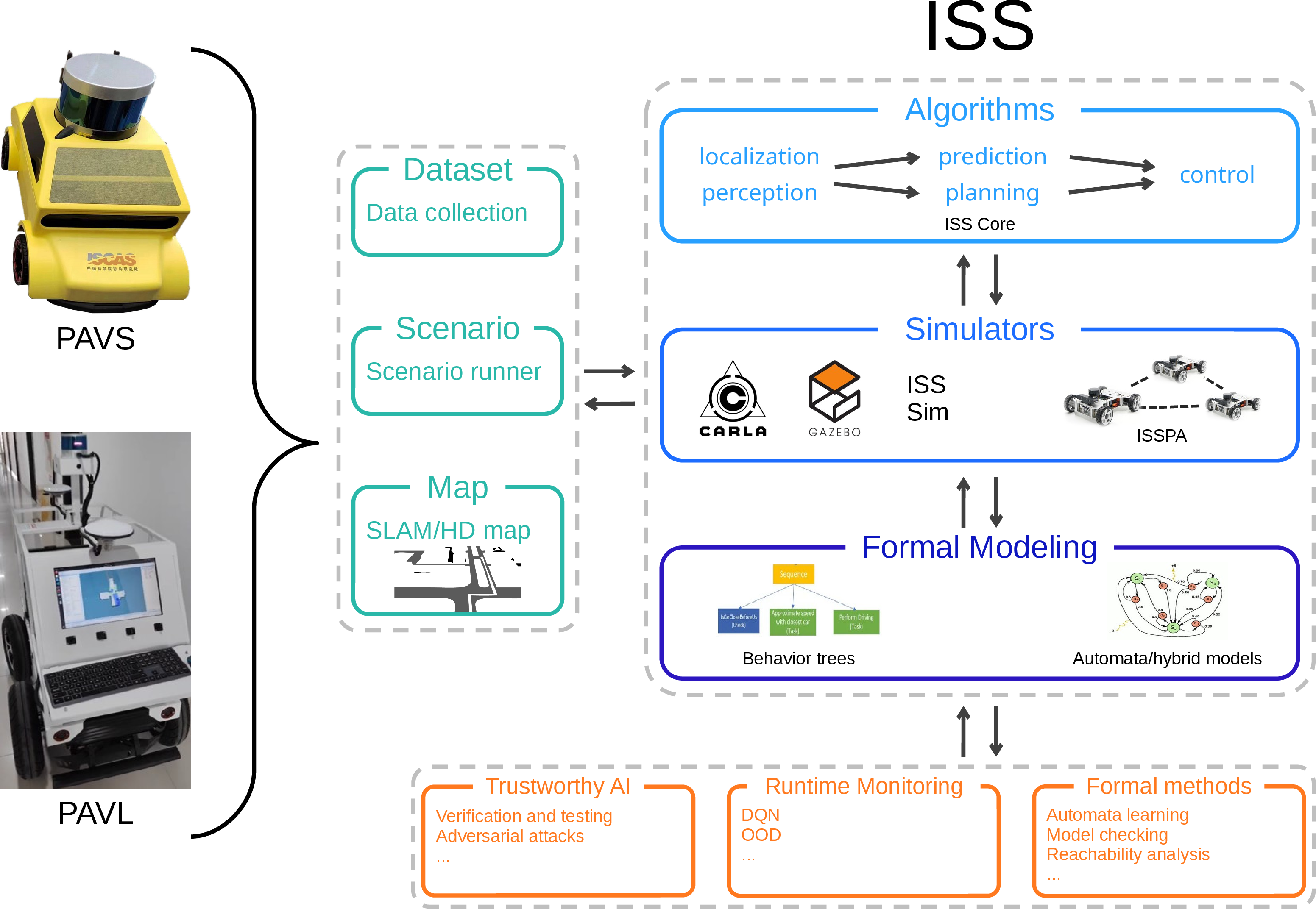
The architecture of ISS is shown in the above figure.
The ISS core makes use of multiple data, such as maps and scenarios, as input; it can also produce them as byproduct of guiding an autonomous vehicle in a new environment. To guarantee the safety of the vehicle and other entities in the environment, the ISS core adopts multiple verification techniques to constraint its behavior.
ISS in Action
Simulator Demos
At present, the ISS framework has the capability to deploy and test algorithms using data generated by a simulator. Upon integrating sensor data from the CARLA simulator into our framework, we can evaluate a range of algorithms. Additionally, corresponding control algorithms can be employed to maneuver the simulated vehicles. Here are some demonstrations.
Minicar Demos
In addition to simulation results, if the sensor data from a real minicar is transmitted back to ISS via ROS, the ISS framework can leverage the sensor data to accomplish a variety of tasks and exert control over the physical minicar. We present below three videos showing the interaction of ISS with real minicars.